Süßigkeitenautomat
• 3 min read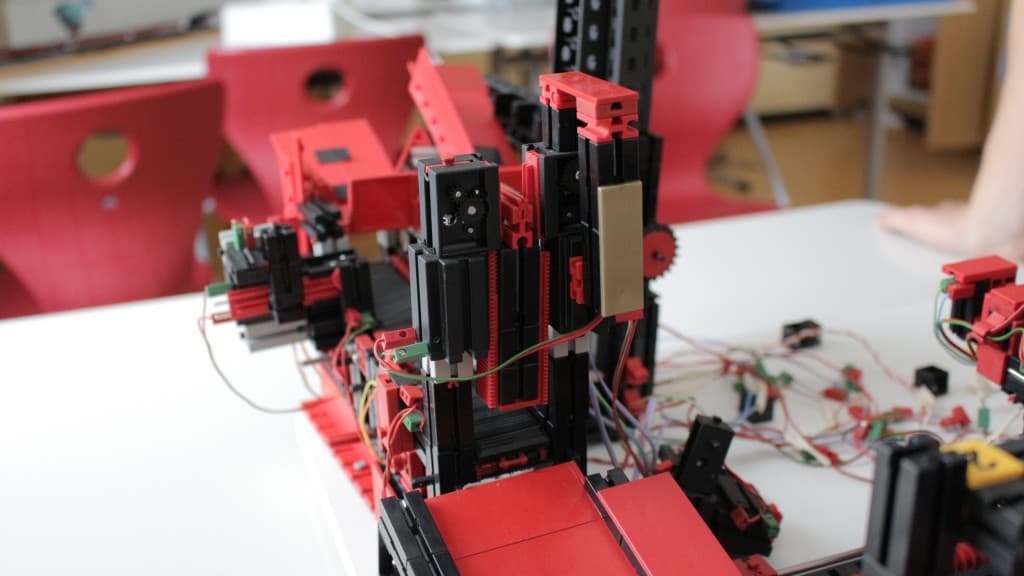
Dieses Video zeigt die erste Version beim Schulkonzert 2012:
Das Projekt wurde mehrfach umgebaut, hier sieht man die letzte Version:
Inzwischen wurde das Projekt auseinandergenommen, da wir die Teile und Controller für Industrie 4.0 benötigt haben.
Der Süßigkeitenautomat besteht aus einer Presse, einem Hochregallager mit zwei Robotern, einem Greifarm und 2 Explorern. Unten werden die einzelnen Komponenten genauer beschrieben.
Die Anlage kann ein Bonbon z.B. ein M&M, in eine Box verpacken, diese einlagern und bei Bedarf auch wieder auslagern und der gewünschten Person ausliefern. Das komplette Projekt basiert auf Fischertechnik, ist mit RoboPRO programmiert und wird mit TX-Controllern gesteuert.
Explorer 1 (Boxzulieferung):
Der erste Explorer hat die Aufgabe, die leeren Boxen eines Kunden aufzunehmen und der Presse zuzuliefern. Er orientiert sich mit einem Farbsensor an einem schwarzen Klebebandstreifen. Zum Anhalten verfügt er über mehrere Reedkontakte, also Magnetsensoren, die auf die an der Strecke angebrachten Magnete reagieren.
In der letzten Version kam der Explorer nicht mehr zum Einsatz.
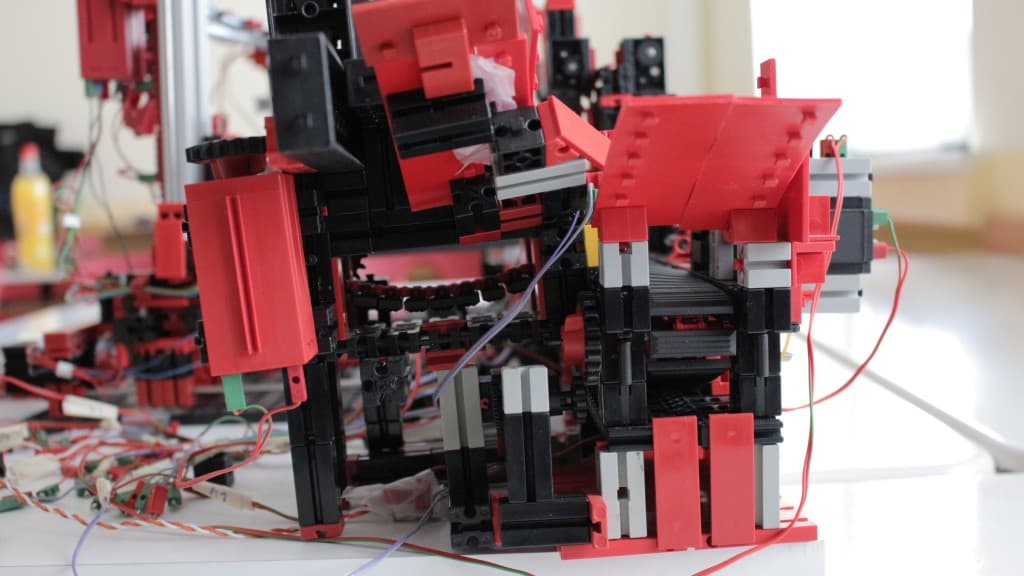
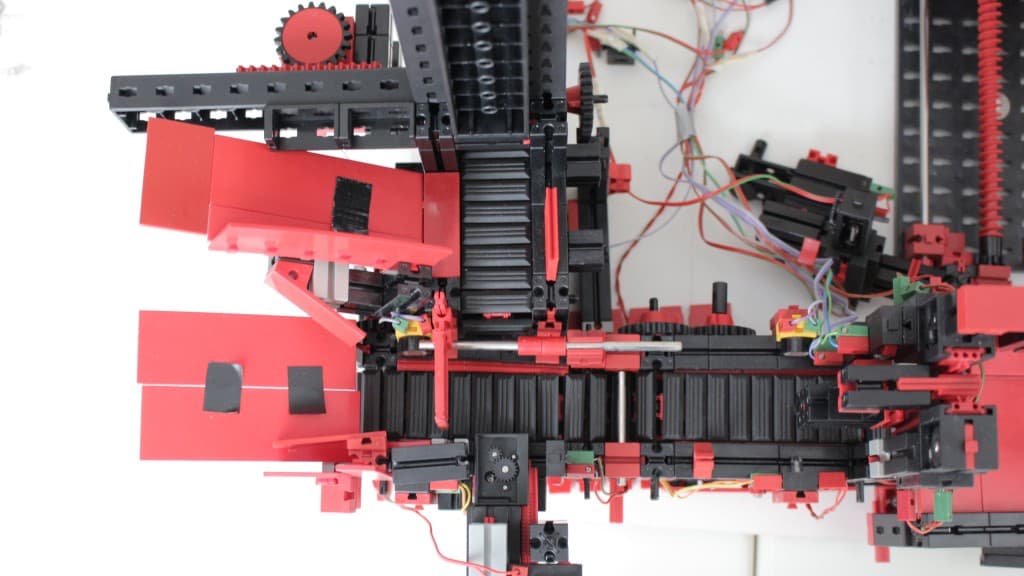
Presse:
Nachdem der Explorer den Deckel der Box und die Box selber abgeliefert hat, sorgt die Presse mit einem Förderband dafür, dass das M&M in die Box fällt und der Deckel darauf gelegt wird. Nun bewirkt ein Motor, dass der Deckel auf die Box gepresst wird, sodass sie geschlossen ist.
In der letzen Version der Anlage wurde die Anlieferung „per Hand“ erledigt, wie im Video zu sehen ist.
Dies ist schließlich die letzte Version der Presse, bevor das Projekt aufgegeben wurde:
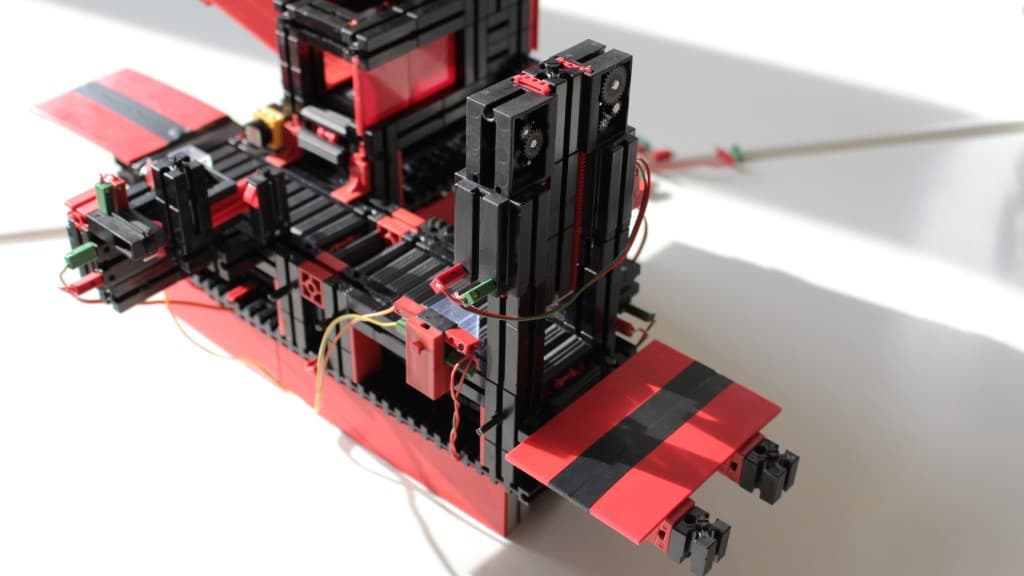
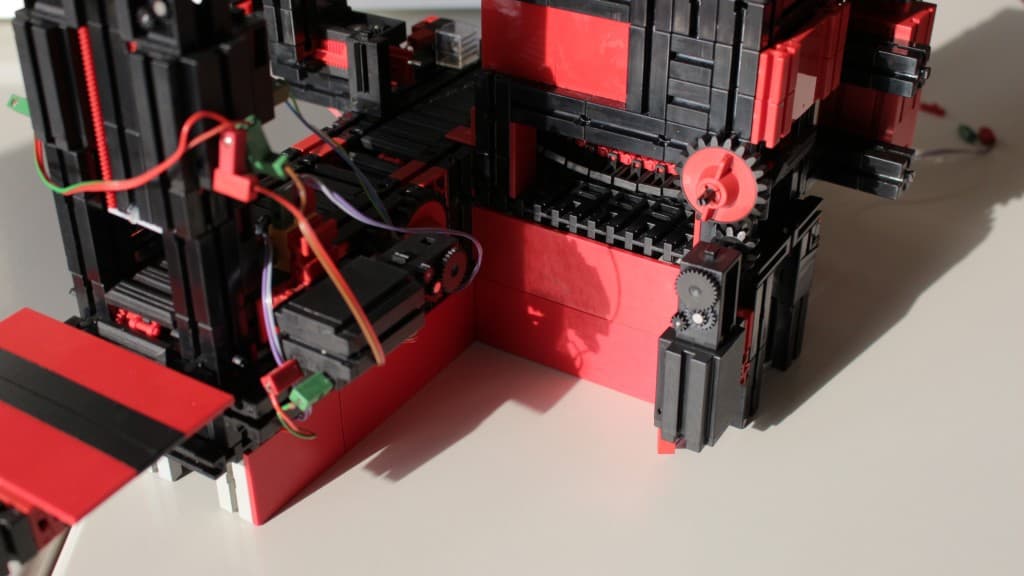
Einlagerungsroboter (Hochregallager):
Die Box wird nun zum Greifer des Einlagerungsroboters (Regalbediengerät) befördert. Dieser nimmt sich mit seinem Greifer die Box und lagert sie in eines der Fächer vom Hochregallager ein. Das System ist so programmiert, dass der Roboter weiß, welches Fach voll ist und welches nicht.
Auslagerungsroboter (Hochregallager):
Der Auslagerungsroboter ist gleich aufgebaut, wie der Einlagerungsroboter. Er besitzt ebenfalls einen Greifer und einen Turm. Außerdem arbeitet er mit dem selben System wie der Einlagerungsroboter und erkennt somit auch, in welchem Fach eine Box eingelagert ist, die er herausholen kann. Wenn er eine Box ausgelagert hat, legt er sie auf einen Halter.
In der letzten Version des Süßigkeitenautomats sind Einlagerung und Auslagerung in ein Regalbediengerät kombiniert.
Greifarm:
Der Greifarm besteht aus einer Säule, die 360° drehbar ist und einem Ausleger, an dem eine Greifzange angebracht ist. Als einziger Roboter hat er einen „Spitznamen“ bekommen: W3. Er erkennt durch eine Lichtschranke, wenn eine Box auf den Halter gelegt wird und fährt dorthin. Als nächstes greift er sich die Box, fährt den Ausleger hoch und dreht sich zurück, in die andere Richtung, wo ein weiterer Explorer (mobiler Roboter) wartet. Nun öffnet er seine Greifzange und das Bonbon fällt in die Ablage vom 2. Explorer. Der letzte Explorer wurde in der finalen Anlage durch eine „statische“ Ausgabe ersetzt.
Explorer 2 (frühe Version):
Nachdem die Box auf der Ablage liegt, fährt der Explorer 2 los und folgt, wie Explorer 1, einer schwarzen Linie. Die kreisförmige Linienspur hat an zwei Stellen Magneten verbaut, damit der Explorer weiß, wann er stoppen soll. Dies erkennt er durch 2 Reedkontakte. Nachdem die Süßigkeit entnommen wurde fährt der Roboter wieder zum Greifarm und der Prozess ist abgeschlossen.