Tic-Tac-Toe Roboter
• 1 min read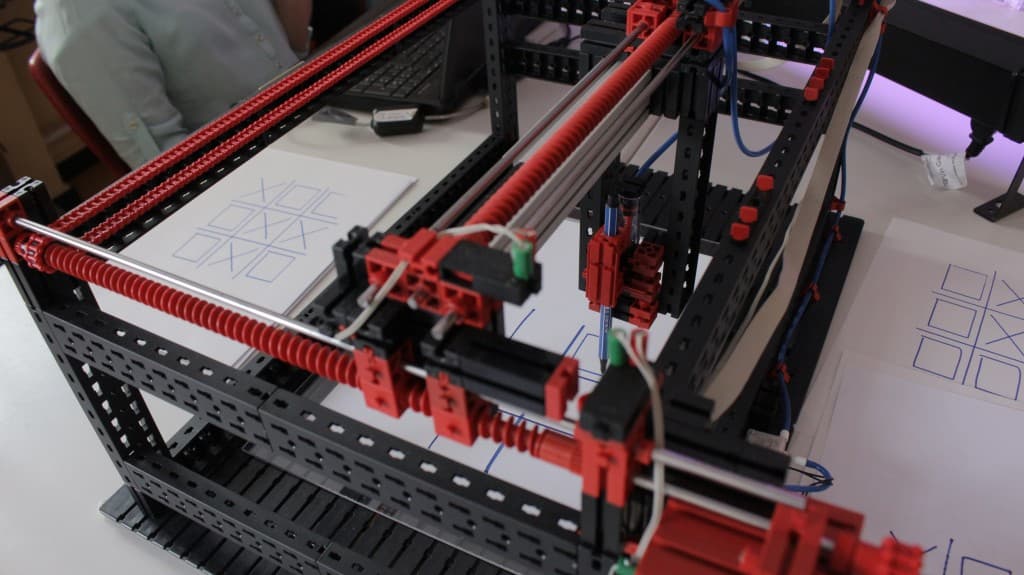
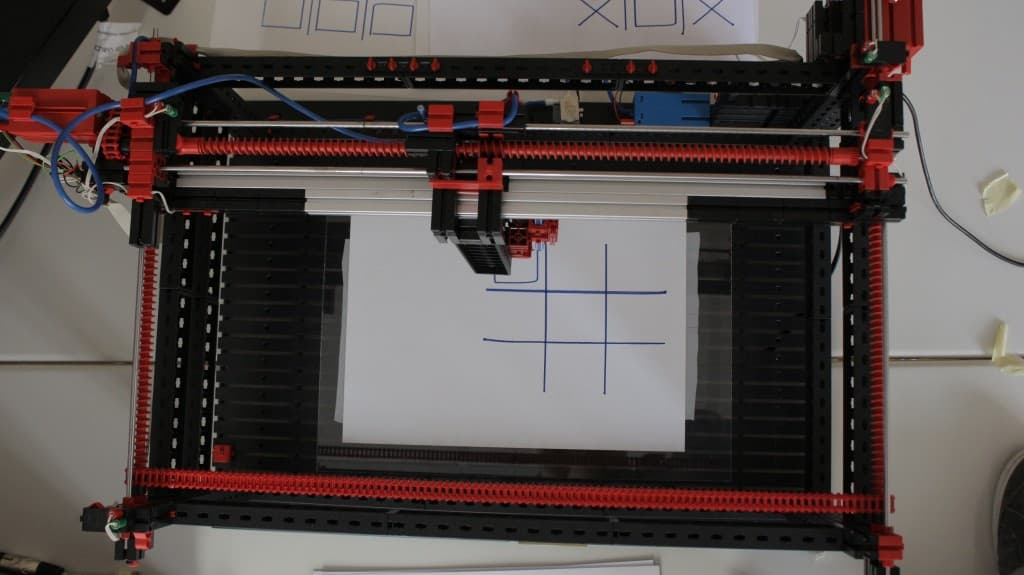
Der wesentliche Aufbau des Tic-Tac-Toe-Roboters ist der eines Plotters.
Es gibt 3 Achsen: Die Z-Achse (Stifthöhe) und die X-, sowie Y-Achse (Zeichenrichtung).
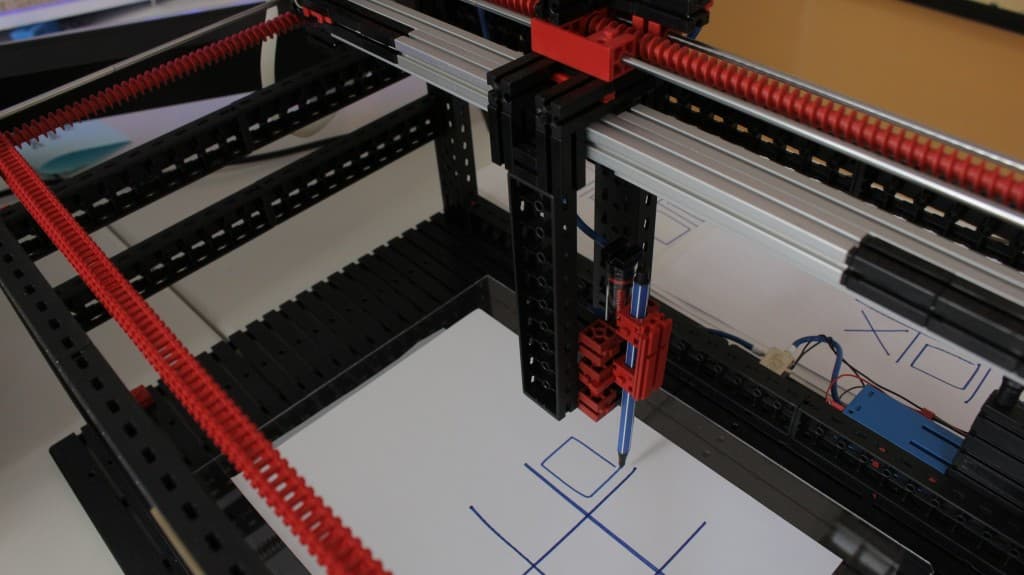
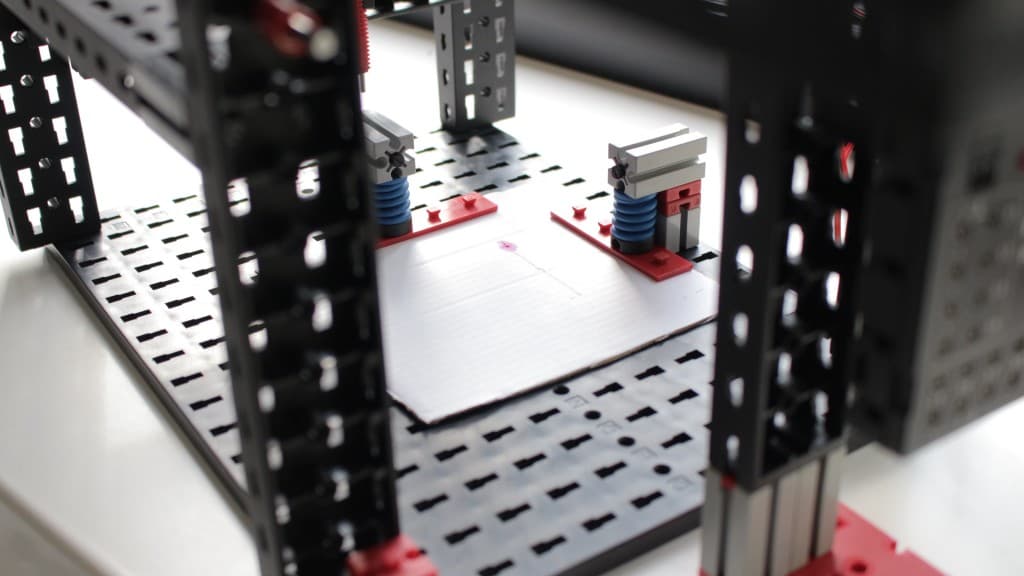
Die Z-Achse wird mit einem Pneumatik-Zylinder betrieben und sorgt somit dafür, dass der Stift von Papier gehoben wird, bzw. zum Zeichnen auf das Papier gedrückt wird. Die beiden anderen Achsen werden mit Schneckenwellen bewegt, die jeweils von einem Fischertechnik Encodermotor angetrieben werden.